Searcher (In-Progress)
Searcher is an autonomous pick-and-place robot. This project is a self-designed independent study of mechanical, electrical, and software design. The hardware was manufactured using a 3D printer, metal laser cutter, 3-axis mill, and lathe. The electrical system was designed in KiCad and manufactured as a custom PCB. The software includes a laptop interfacing with a Raspberry Pi 4 over serial communication, a custom Tkinter application for control and monitoring, and joint movement determined by a custom PyTorch model generated using IsaacLab and IsaacSim.
ROS 2 controls and MoveIt 2 path planning was originally used before switching to IsaacSim and IsaacLab. IsaacLab generates a SKRL based PyTorch model that is converted to the ONNX format. This ONNX file is deployed onto the Raspberry Pi and used for arm control using common Python libraries and no additional path planning software.
Physical robot assembly of the updated design is currently delayed until additional tools arrive. The control PCB design is being updated into a HAT for the Raspberry Pi.

Older Robot Version Modeled in Fusion 360
Current Robot Model in Fusion 360
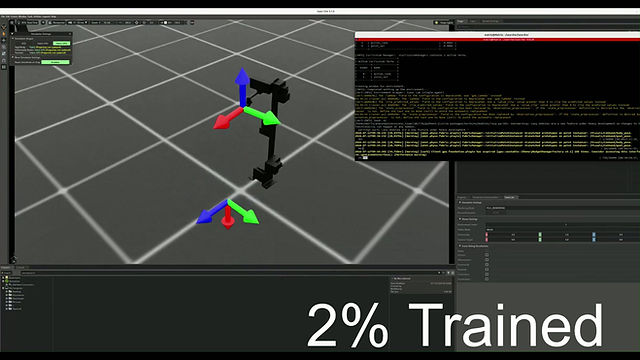
Training the Control Model in IsaacLab & IsaacSim

Running the ONNX joint movement model

Custom Servo Teeth Fusion 360 CNC Machining
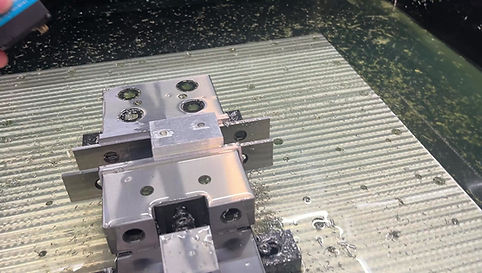
Gear Negative Manufacturing Test on 3-Axis Mill

MoveIt 2 Path Planning as Shown by RViz 2

ROS 2 Searcher Controller Launched in Terminal

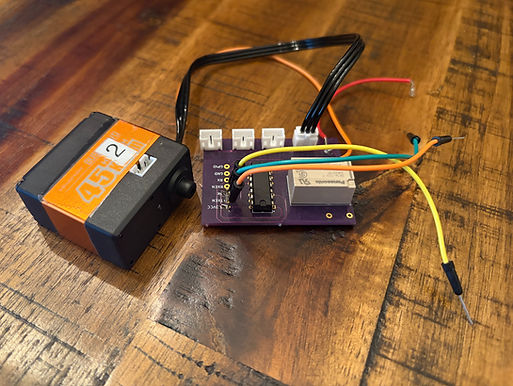
Manufacturing Process Test PCB with Reduced Components

In-Progress Searcher PCB Schematic in KiCad
Prototype Searcher Control Application